Frederic RIBLE
2016-12-08 21:56:02 UTC
Hello
At Electrolab hackerspace, we are working on the retrofit of a
Mori-Seiki SL0 CNC lathe.
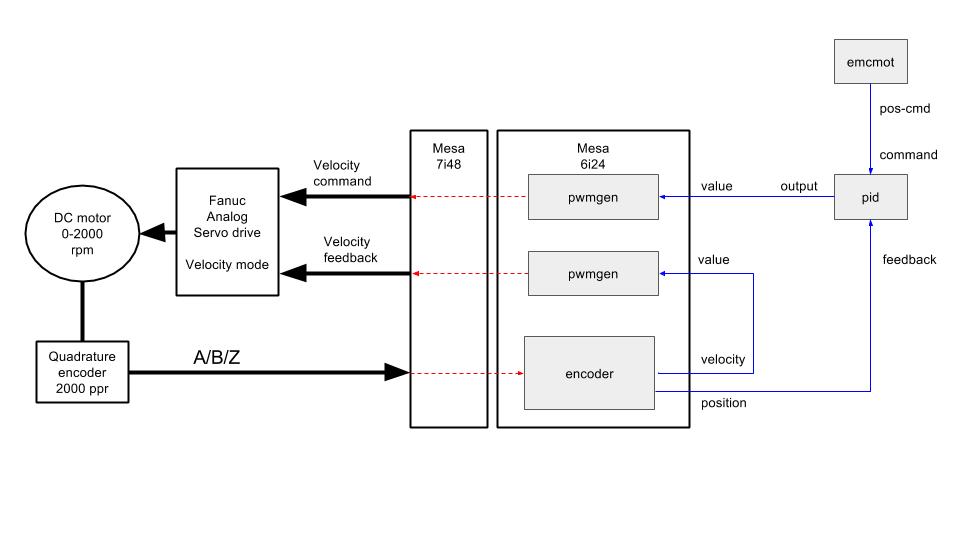
We are are using a Mesa 6i24/7i48 combination.
The drive is a A06B-6047-H208 (double velocity control unit).
Axis motors are A06B-0641-B011 and A06B-0642-B011 (yellow cap).
The position feedback comes from a 2000ppr encoder.
We use the Mesa board to convert the pulses to an analog feedback
velocity signal.
We have done the HAL cabling as below.
First results are promising : we can control the position.
But we see some oscillations on the velocity (periodic with 33 ms period).
Oscillations start when the position command changes, and never stop,
even when the pos-cmd becomes constant.
Same issue if we disable the PID loop in HAL.
So we believe the problem is coming from the drive.
When we decrease the analog gain in the drive after the error amplifier
(comparison between velocity command and feedback), we can decrease the
oscillation.
As we can see a phase compensation circuit in the drive, we assume this
is to compensate for delay on velocity feedback.
So, we have tried to add some delay on the velocity feedback assuming
original F/V converter from the Fanuc control board may be slower than
what we have with Mesa. Not much success: that changes a little the
oscillation period, but we cannot cancel oscillation.
Anyone knows how we can tune the drive (unfortunately we have not the
documentation for this part number) ?
Thanks
Frederic.
Loading Image...
At Electrolab hackerspace, we are working on the retrofit of a
Mori-Seiki SL0 CNC lathe.
We are are using a Mesa 6i24/7i48 combination.
The drive is a A06B-6047-H208 (double velocity control unit).
Axis motors are A06B-0641-B011 and A06B-0642-B011 (yellow cap).
The position feedback comes from a 2000ppr encoder.
We use the Mesa board to convert the pulses to an analog feedback
velocity signal.
We have done the HAL cabling as below.
First results are promising : we can control the position.
But we see some oscillations on the velocity (periodic with 33 ms period).
Oscillations start when the position command changes, and never stop,
even when the pos-cmd becomes constant.
Same issue if we disable the PID loop in HAL.
So we believe the problem is coming from the drive.
When we decrease the analog gain in the drive after the error amplifier
(comparison between velocity command and feedback), we can decrease the
oscillation.
As we can see a phase compensation circuit in the drive, we assume this
is to compensate for delay on velocity feedback.
So, we have tried to add some delay on the velocity feedback assuming
original F/V converter from the Fanuc control board may be slower than
what we have with Mesa. Not much success: that changes a little the
oscillation period, but we cannot cancel oscillation.
Anyone knows how we can tune the drive (unfortunately we have not the
documentation for this part number) ?
Thanks
Frederic.
Loading Image...